조이스틱 화면 구성
ALICE M1을 운용할 때 사용하는 조이스틱 컨트롤러의 GUI를 각 탭 별로 설명하는 페이지 입니다.
조이스틱 화면 기준 좌측 메뉴를 메인 탭, 위쪽 메뉴를 서브 탭으로 정의합니다.
조이스틱 내부는 지속적으로 개발 중이며, 탭 및 기능이 추가/삭제될 수 있습니다.
- Dashboard
- Control
- Navigation
- Physical AI
- E-STOP
- Settings
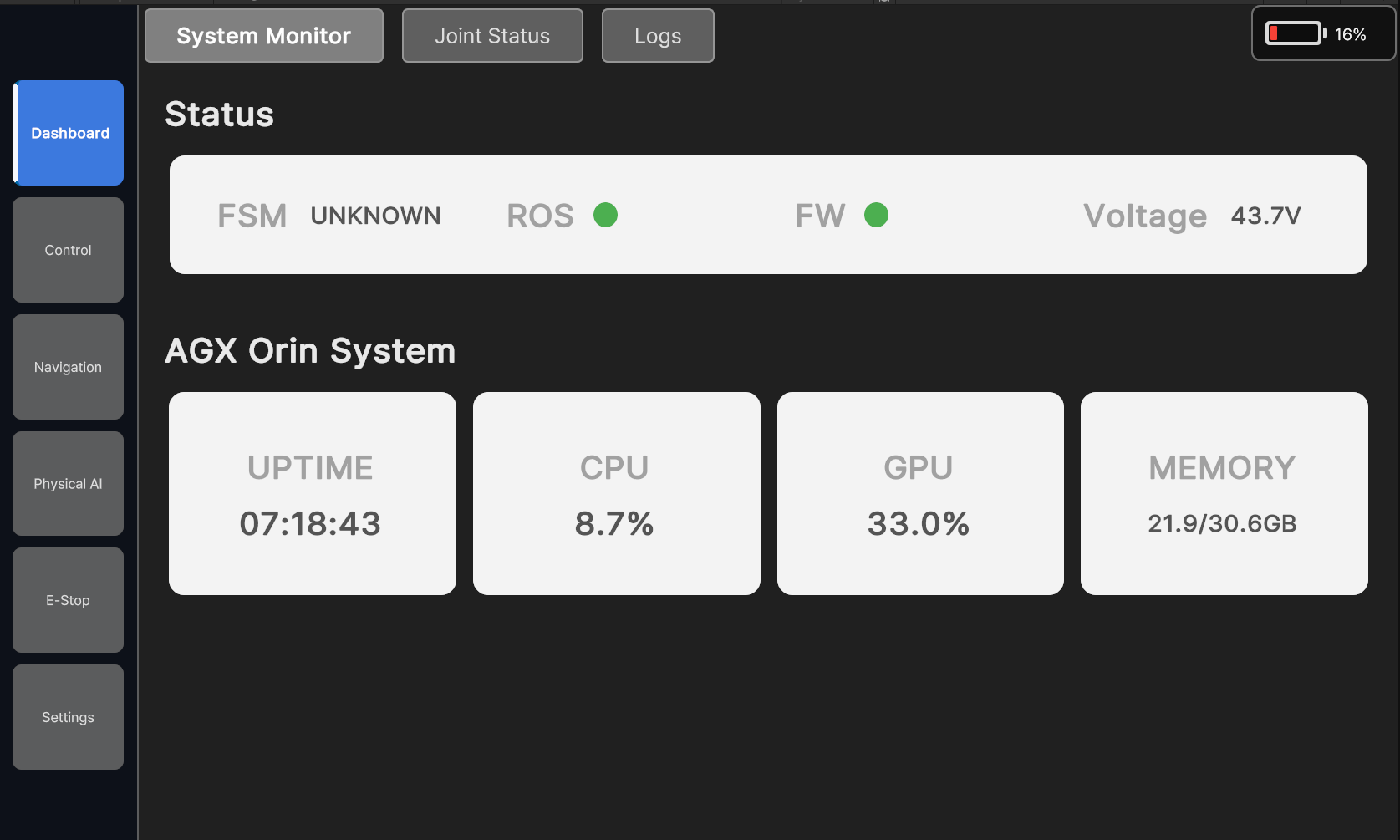
System Monitor
로봇의 시스템 상태를 확인합니다.
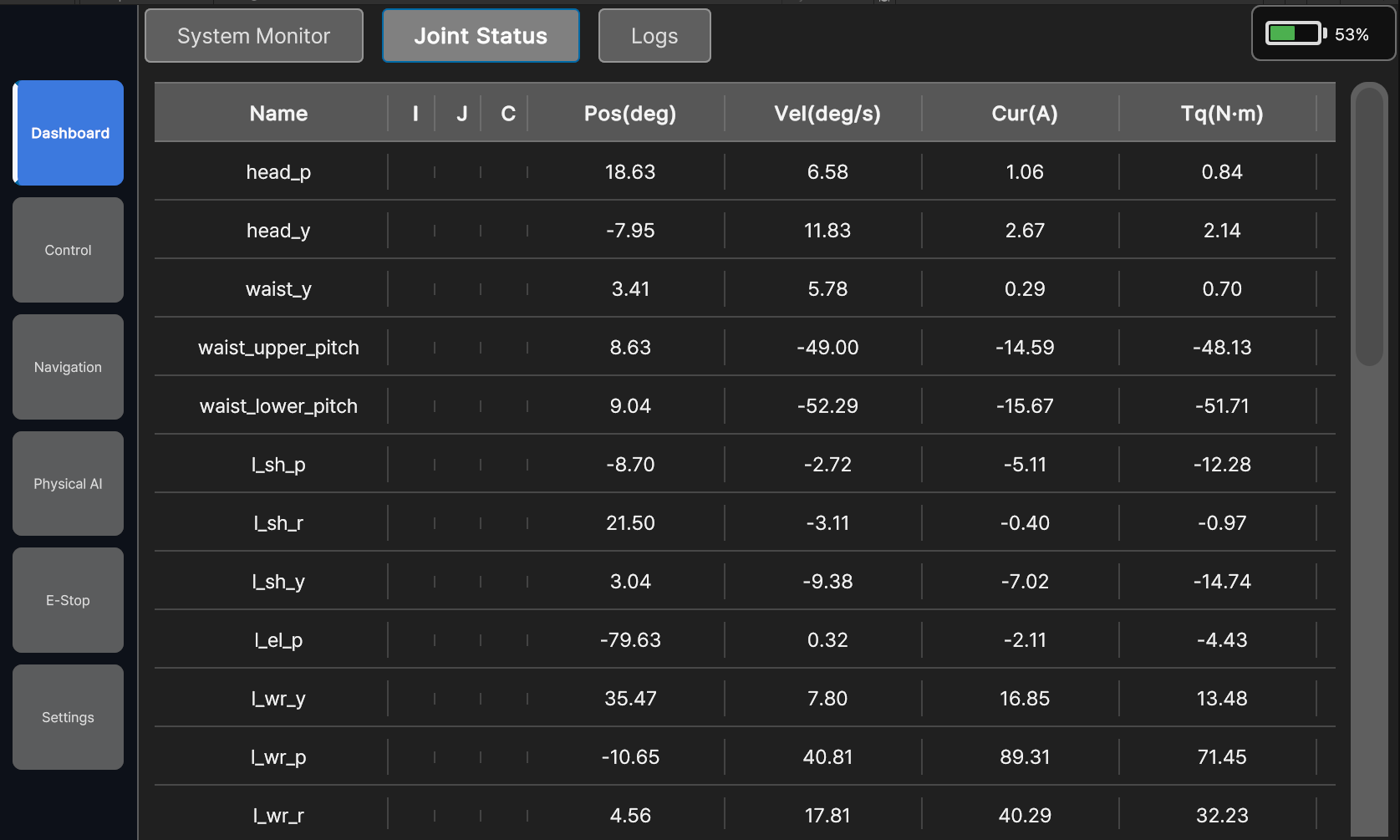
Robot Status
로봇의 각 관절에 대한 상태를 확인합니다.
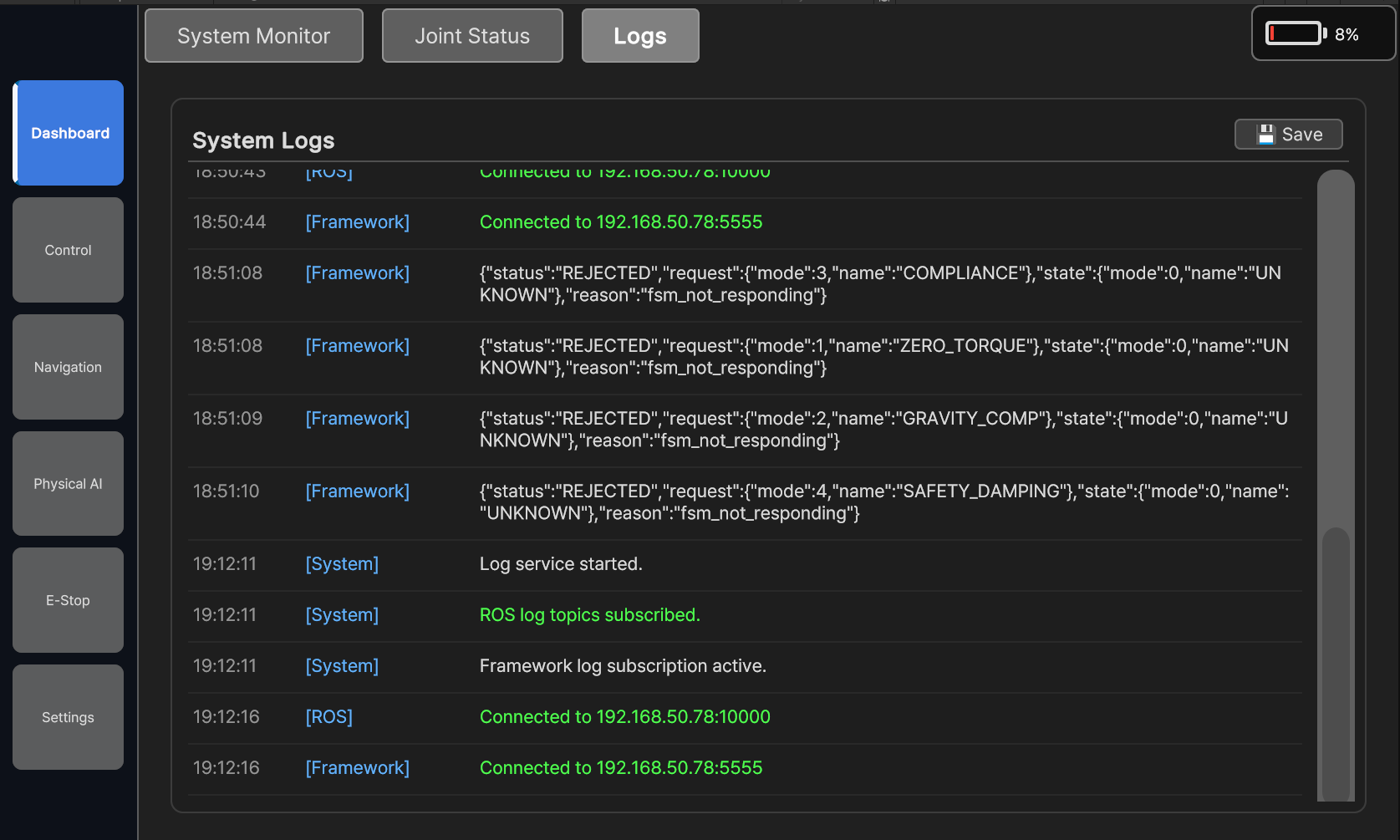
Logs
최근 이벤트/오류 로그를 확인합니다.
Initialize
로봇 초기화 시 사용하는 버튼들의 모음 페이지입니다.
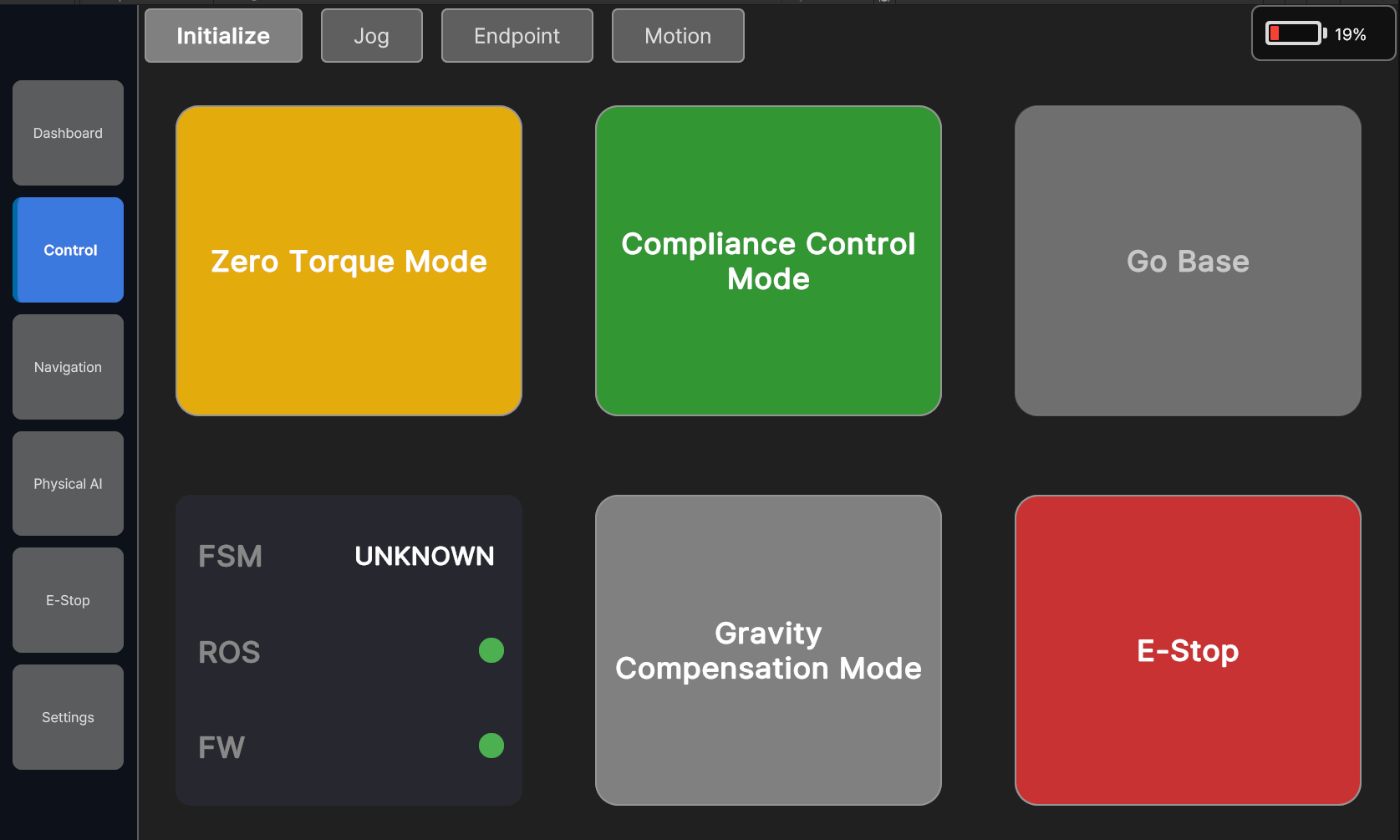
로봇 최초 구동 시 Zero Torque Mode -> Compliance Control -> Go Base 순으로 버튼을 누르게 됩니다.
Jog
(TBD) 조인트/축 단위 수동 이동(Jog) 방법 설명
Endpoint
(TBD) 엔드포인트 기반 제어/좌표 입력 방식 설명
Motion
(TBD) 모션 실행/저장/불러오기/재생 관련 설명
Mobile
ALICE M1의 최대 전진 후진 속도는 0.5m/s, 회전 속도는 1.57rad/s, 사용환경은 평지(0°) 입니다.
바닥면의 마찰 정도에 따라 제어 입력보다 더 느리게 또는 더 빠르게 이동 할 수 있습니다.
로봇의 무게중심이 높은 자세에서 빠른 속도로 이동 및 회전 시 로봇 전복의 위험이 있습니다.
허용 기준치 이상의 환경에서 작동 시 오작동 및 안전사고의 위험이 있으며 사용자의 부주의에 의한 사고가 나지 않도록 유의 부탁드리겠습니다.
모바일 베이스 수동 이동을 위한 페이지입니다.
아날로그 조이스틱 및 화면의 가상 조이스틱을 활용하여 로봇의 모바일 베이스를 수동으로 이동할 수 있습니다.

좌측 탭 : 컨트롤러에서 로봇으로 입력하는 X, Y, Z(회전) 값
우측 탭 : 조이스틱 입력 값의 최대값을 조절할 수 있습니다.
값을 천천히 증가시키는 스무딩 기능을 체크할 수 있습니다.
토픽의 전송주기를 정할 수 있습니다.
우측 상단에는 로봇으로 명령을 전달할 지 결정하는 체크박스가 있습니다.
Mapping
(TBD) 맵 생성/저장/불러오기 절차 설명
SLAM
(TBD) SLAM 실행/로컬라이제이션 모드 설명
Navigation
(TBD) 목표 지정/경로 계획/자율 주행 절차 설명
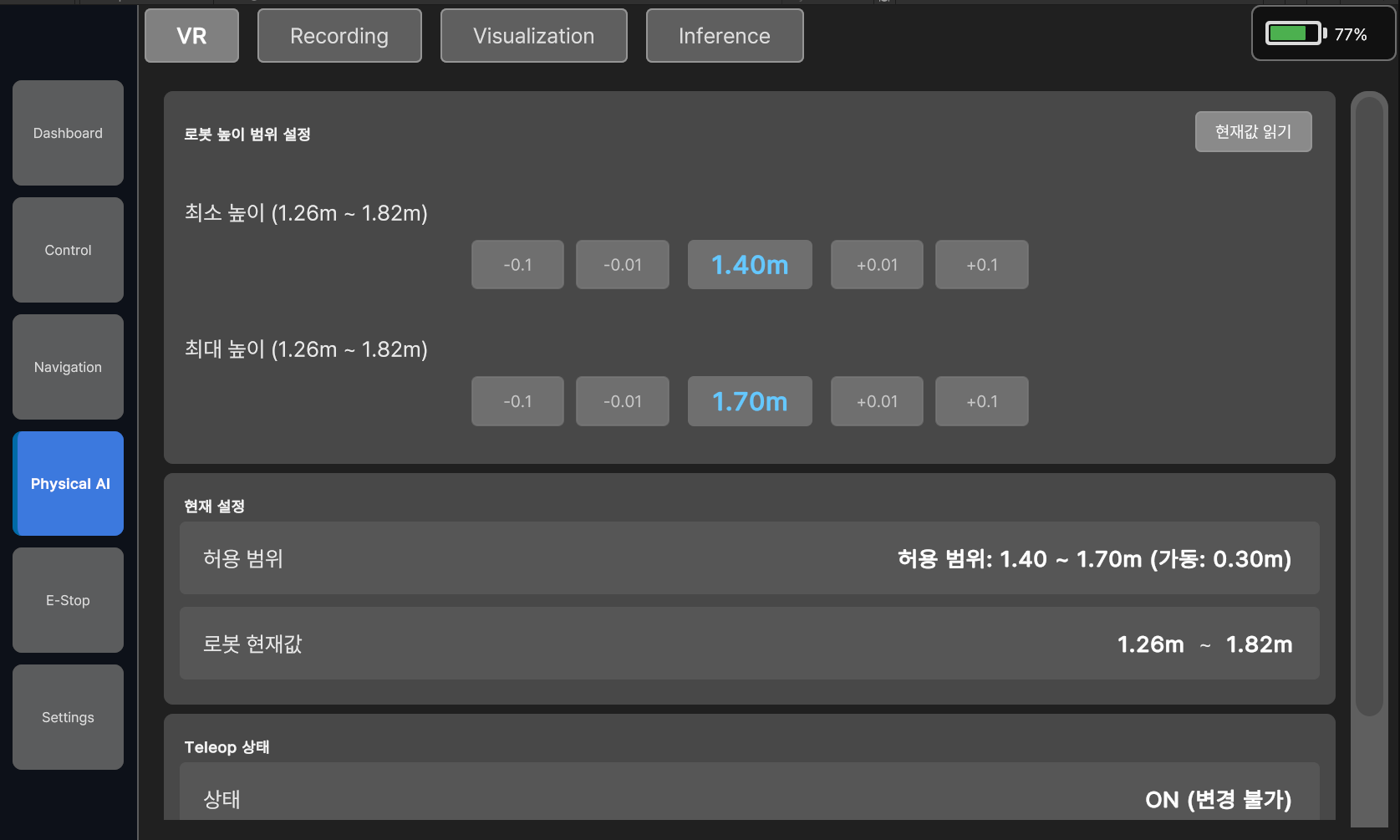
VR
로봇 허리 높이의 최대, 최소를 조절할 수 있는 탭 입니다.

Recording
(TBD) 행동/영상 데이터 녹화 절차 설명
Visualization
(TBD) 수집 데이터 시각화/리플레이 설명
Inference
(TBD) 모델 추론 실행/결과 확인 절차 설명
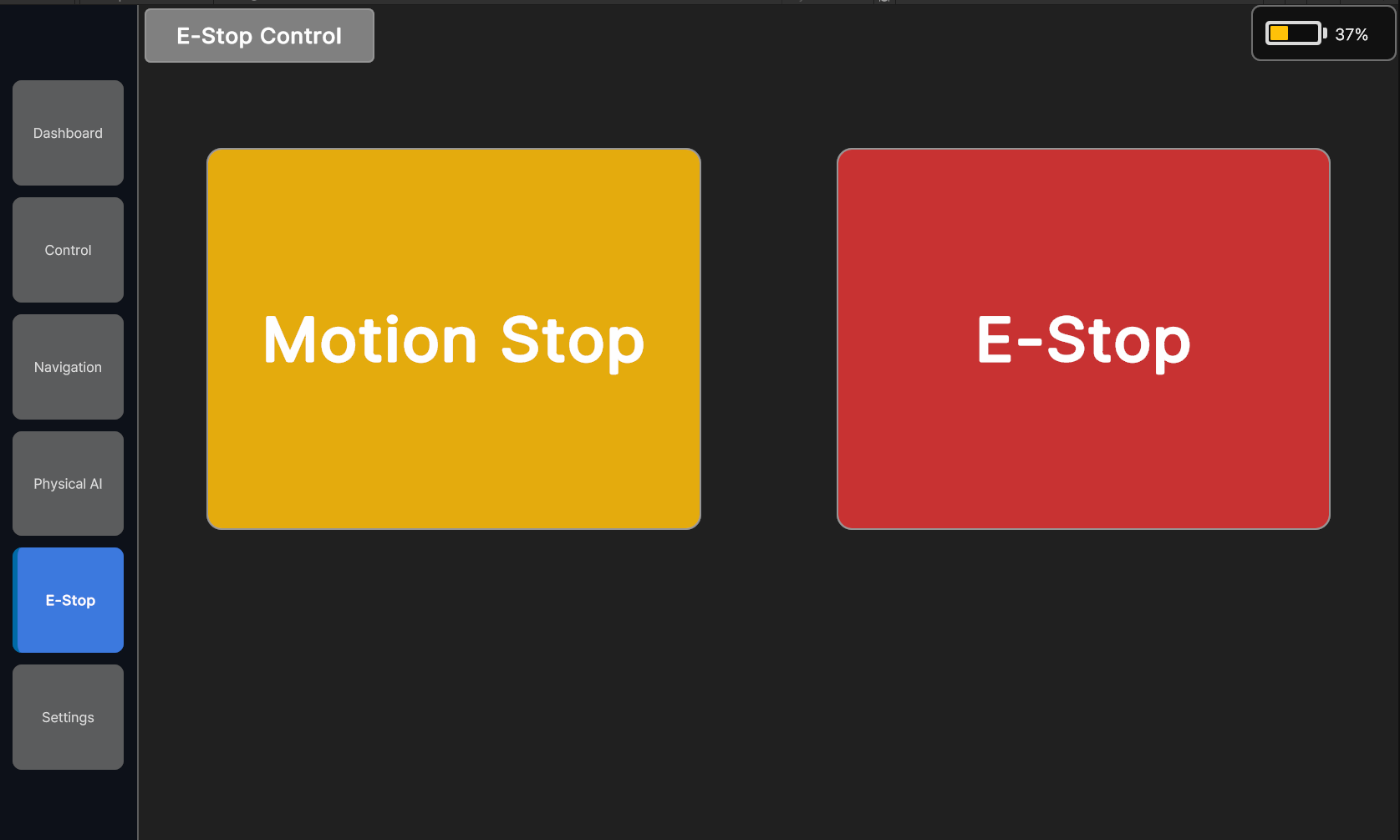
E-Stop Control
모션 정지 및 비상정지 버튼이 존재합니다.
모션 정지 버튼을 눌러 모션을 정지할 수 있습니다.
비상정지 버튼을 눌러 로봇 모터에 제어 입력 및 전원을 차단할 수 있습니다.
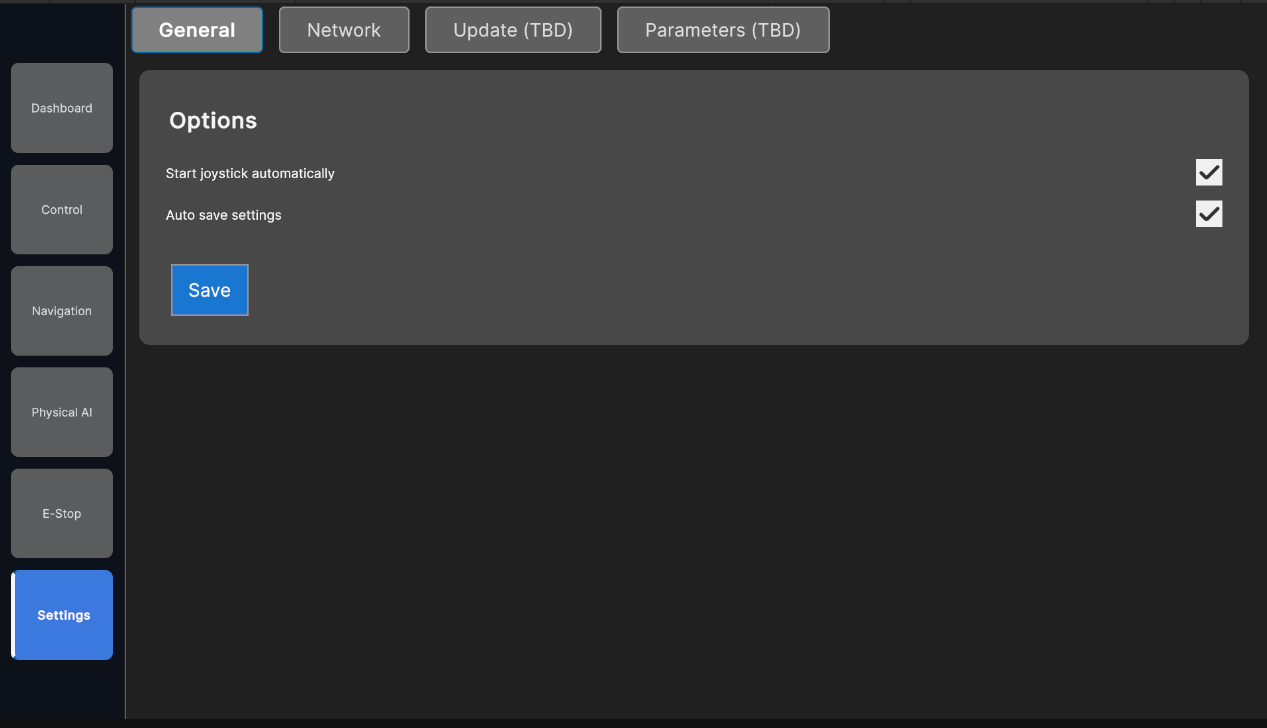
General
일반 설정 항목이 모인 페이지입니다.
어플 시작 시 조이스틱 명령 실행 자동 여부 / 입력 값 자동 저장 여부를 설정할 수 있습니다.
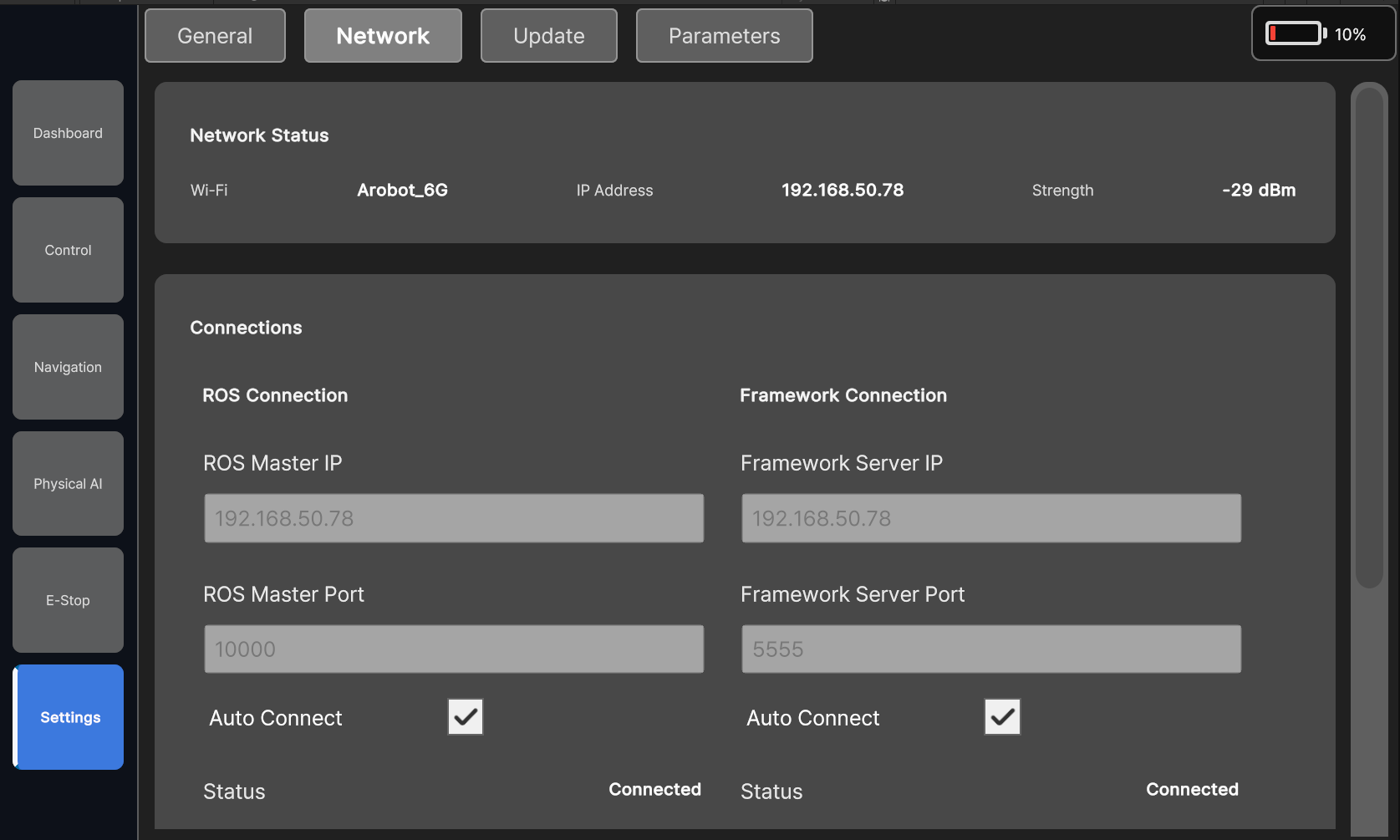
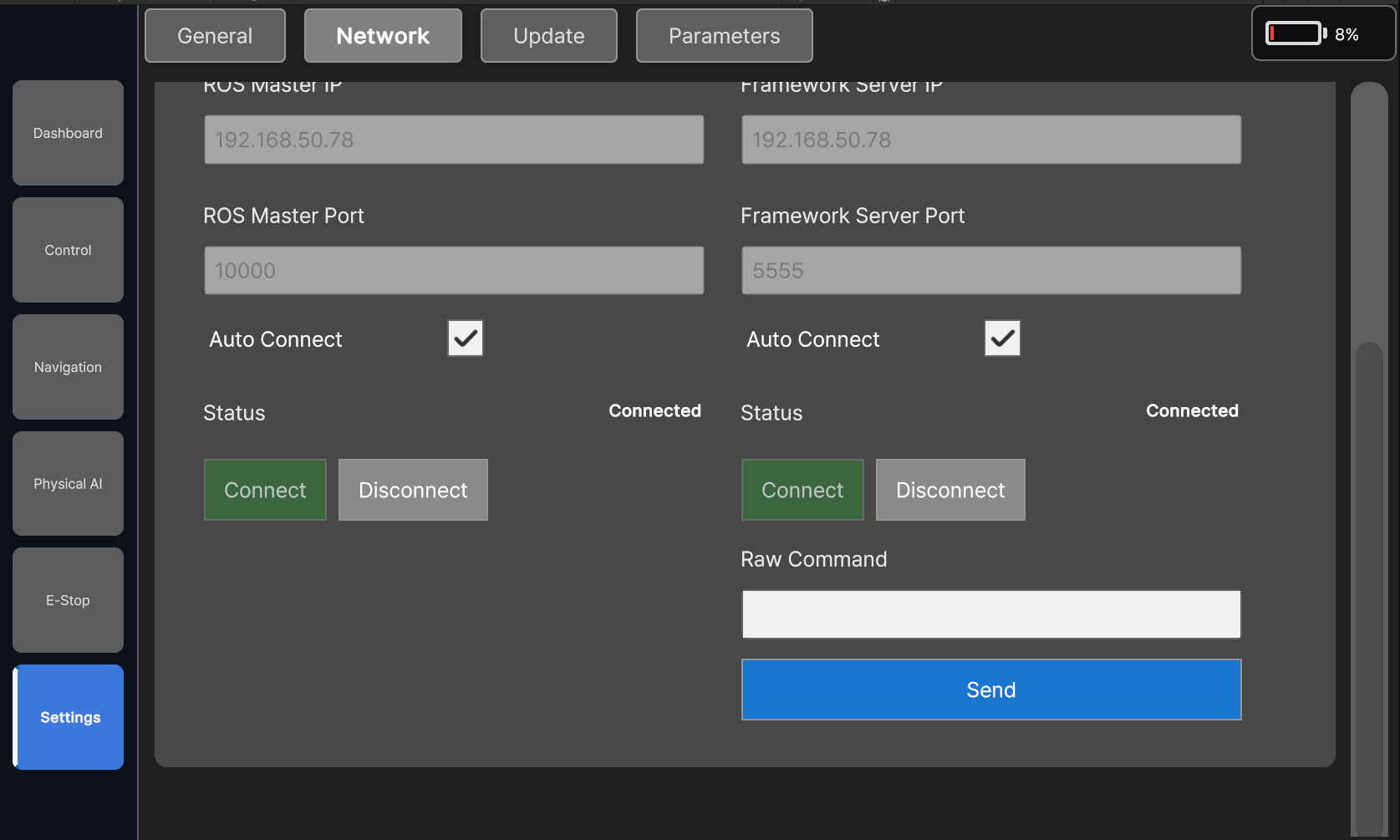
Network
Wi-Fi / ROS / TCP 설정을 모은 페이지입니다.
현재 연결된 네트워크, 컨트롤러의 IP 주소 및 연결세기를 확인할 수 있습니다.
Update
(TBD) 소프트웨어/펌웨어 업데이트 방법
Parameters
(TBD) 파라미터 로드/저장/적용 절차 설명