Software
AIMY 3의 소프트웨어 아키텍처와 제어 시스템을 설명합니다.
개요
AIMY 3는 ROS 2(Robot Operating System 2)를 기반으로 하는 모바일 매니퓰레이션 시스템입니다.
LLM을 통한 대화기능, 디스플레이 및 음성을 활용한 정보제공, 주행 기능이 통합된 소프트웨어 플랫폼으로 다양한 상업 시설에서 방문객을 맞이하고 필요한 정보를 제공합니다.
소프트웨어 스택
- 운영체제: Ubuntu 22.04 LTS
- ROS 버전: ROS 2 Humble
- 네비게이션: Nav2 (Navigation2) (옵션)
- 인식: OpenCV, Stereo Camera
- 대화 기능: LLM (옵션)
시스템 아키텍처
아래 이미지는 AIMY 3의 시스템 아키텍처를 나타냅니다.
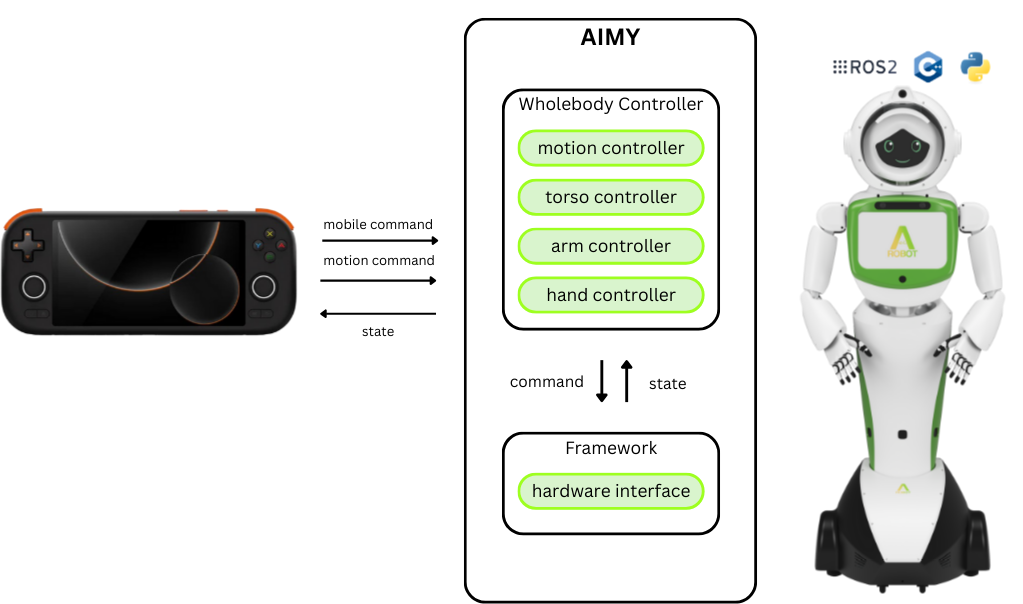
-
Wholebody Controller 모듈은 모션 명령을 처리하여 Framework 모듈로 전달됩니다.
-
Framework 모듈은 상위 명령을 모터 제어 명령으로 변환하여 실제 하드웨어에 전달합니다.
안전 시스템
- 모든 관절 명령은 정의된 동작 범위 내에서 실행되도록 제한(clamp) 됩니다.