GUI 사용법
AIMY 3를 조작하기 위해 사용하는 GUI 사용법을 안내합니다.
- System
- Motion
- Hand
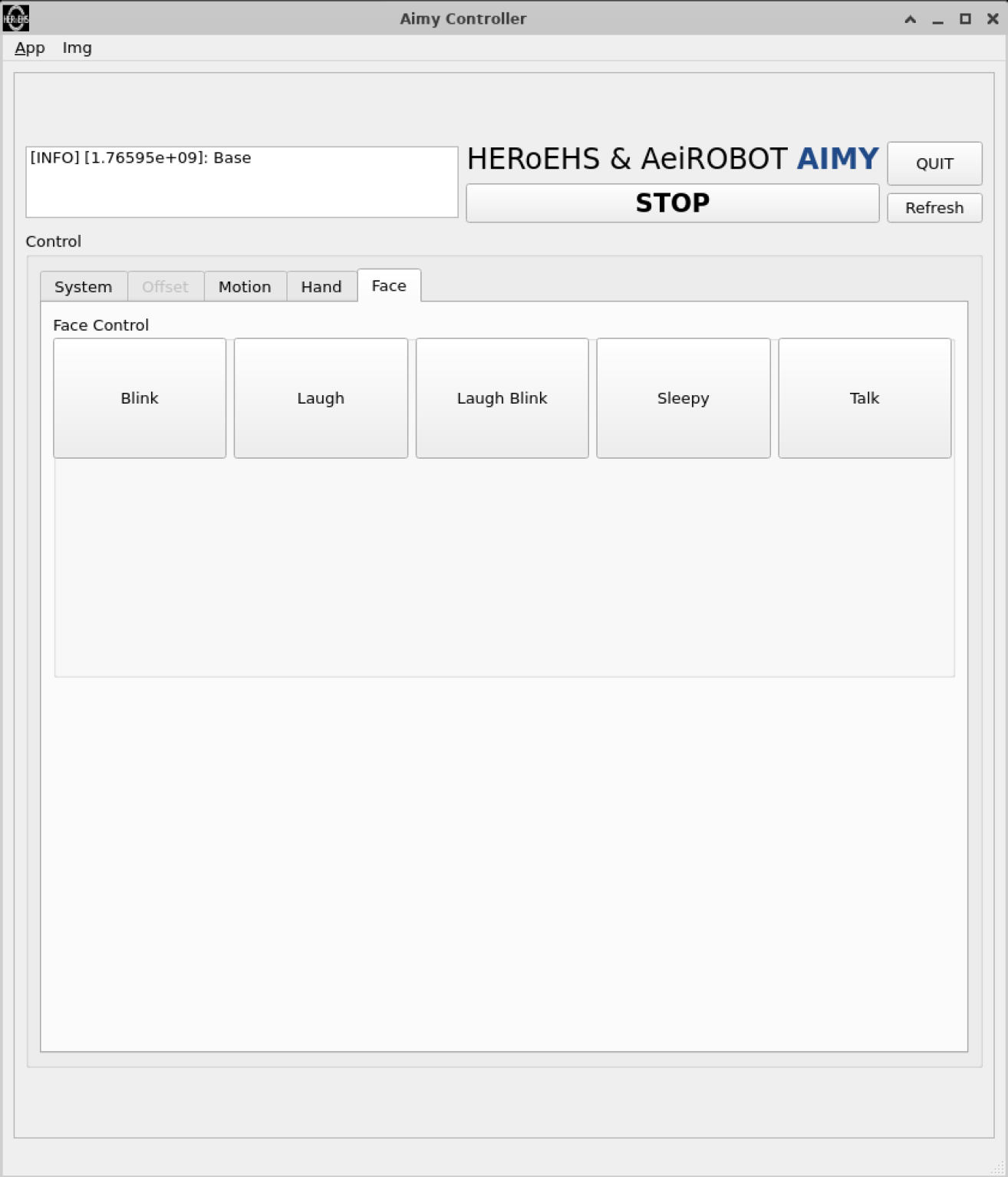
- Face
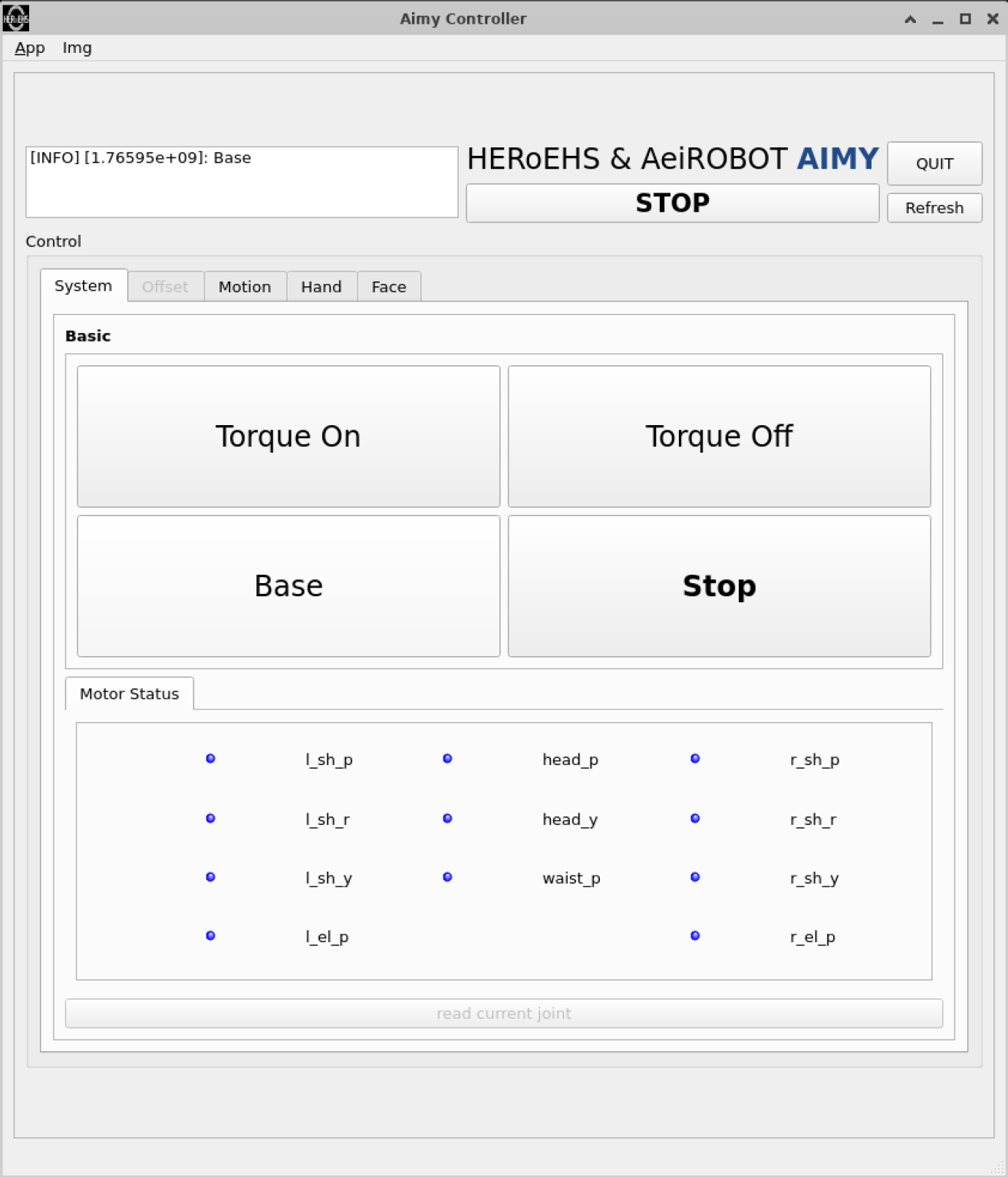
System Tab
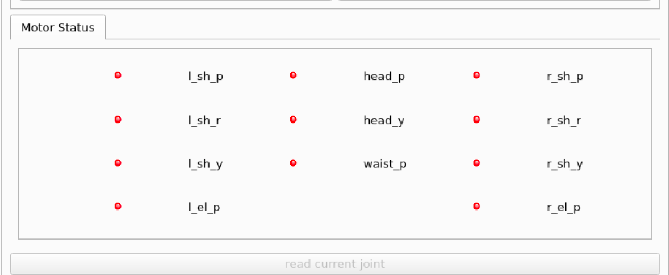
관절 모터 상태를 확인하고 기본 명령을 실행할 수 있습니다.
🚨 작동 전 필독: 안전 안내
반드시 로봇 작동 전에 읽어주세요
아래 안전 수칙을 확인하지 않고 로봇을 작동할 경우 사용자/주변인 안전사고 및 로봇 손상 위험이 있습니다. 전원을 켜기 전에 반드시 숙지하세요.
Motion Tab
관절 각도 및 정해진 모션 명령을 실행할 수 있습니다.
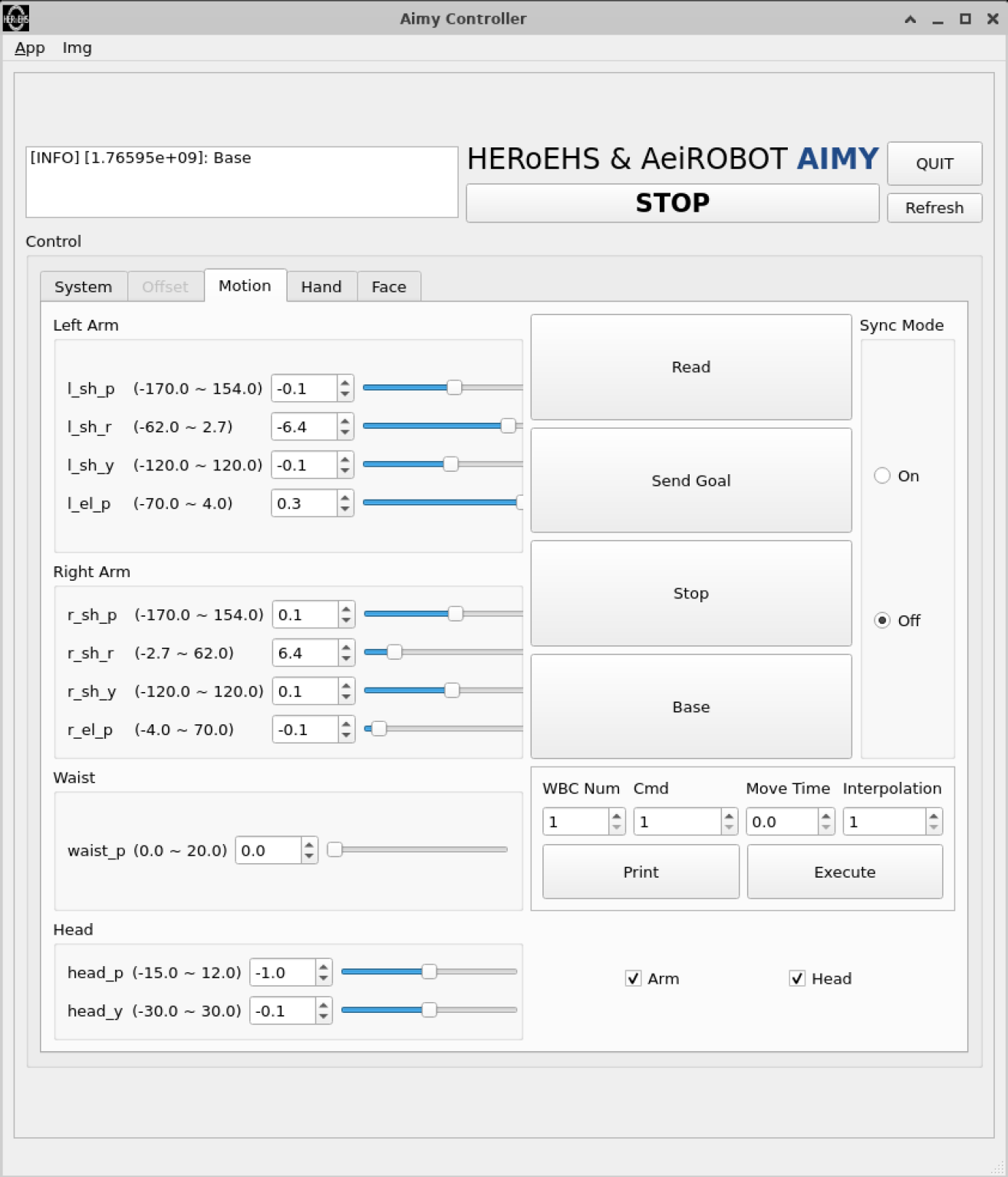
Joint Limits (공통)
| 조인트명 | 조인트 명령어 | 각도 범위 |
|---|---|---|
| Head Pitch | head_p | -15° ~ 12° |
| Head Yaw | head_y | -30° ~ 30° |
| Waist Pitch | waist_p | 0° ~ 20° |
| Left Shoulder Pitch | l_sh_p | -170° ~ 154° |
| Left Shoulder Roll | l_sh_r | -62° ~ 2.7° |
| Left Shoulder Yaw | l_sh_y | -120° ~ 120° |
| Left Elbow Pitch | l_el_p | -85° ~ 4° |
| Right Shoulder Pitch | r_sh_p | -170° ~ 154° |
| Right Shoulder Roll | r_sh_r | -2.7° ~ 62° |
| Right Shoulder Yaw | r_sh_y | -120° ~ 120° |
| Right Elbow Pitch | r_el_p | -4° ~ 85° |
기능 설명
| 버튼 | 기능 |
|---|---|
| Read | 현재 관절 값을 읽어 GUI에 출력합니다 |
| Send Goal | 현재 GUI에 표시된 관절 값으로 로봇이 동작합니다. |
| Stop | 동작을 정지합니다. |
| Base | Base 자세로 동작합니다. |
| Sync Mode | Sync mode가 켜져 있는 동안 GUI의 값이 변경될 때마다 즉시 로봇에 반영되어 로봇이 동작합니다. |
선택된 자세의 관절 값을 터미널에 출력합니다. 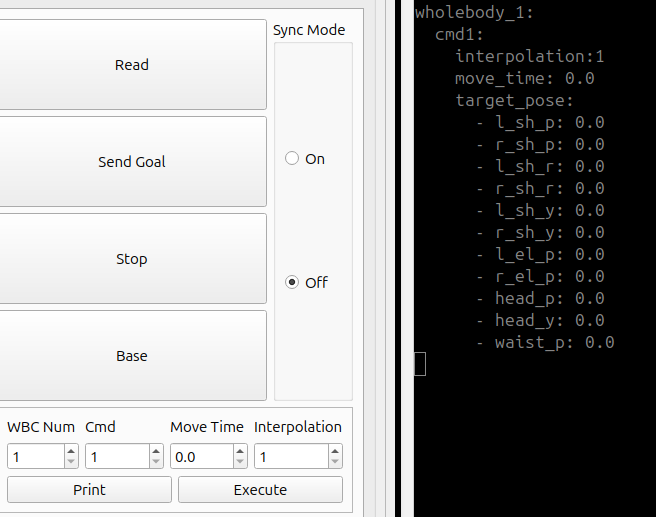 | |
| Execute | 선택된 자세로 로봇이 동작합니다. |
| Arm/Head checkbox | 체크박스에 체크가 된 관절만 동작합니다. |
주의 사항
- Sync Mode를 켜기 전 Read를 눌러 현재 관절 값을 불러와야 합니다.
- Read를 하지 않고 Sync Mode를 키면 GUI의 관절 값으로 로봇이 빠르게 동작합니다.
🚨 작동 전 필독: 안전 안내
반드시 로봇 작동 전에 읽어주세요
아래 안전 수칙을 확인하지 않고 로봇을 작동할 경우 사용자/주변인 안전사고 및 로봇 손상 위험이 있습니다. 전원을 켜기 전에 반드시 숙지하세요.
Hand Tab
손가락 관절 명령을 실행할 수 있습니다.
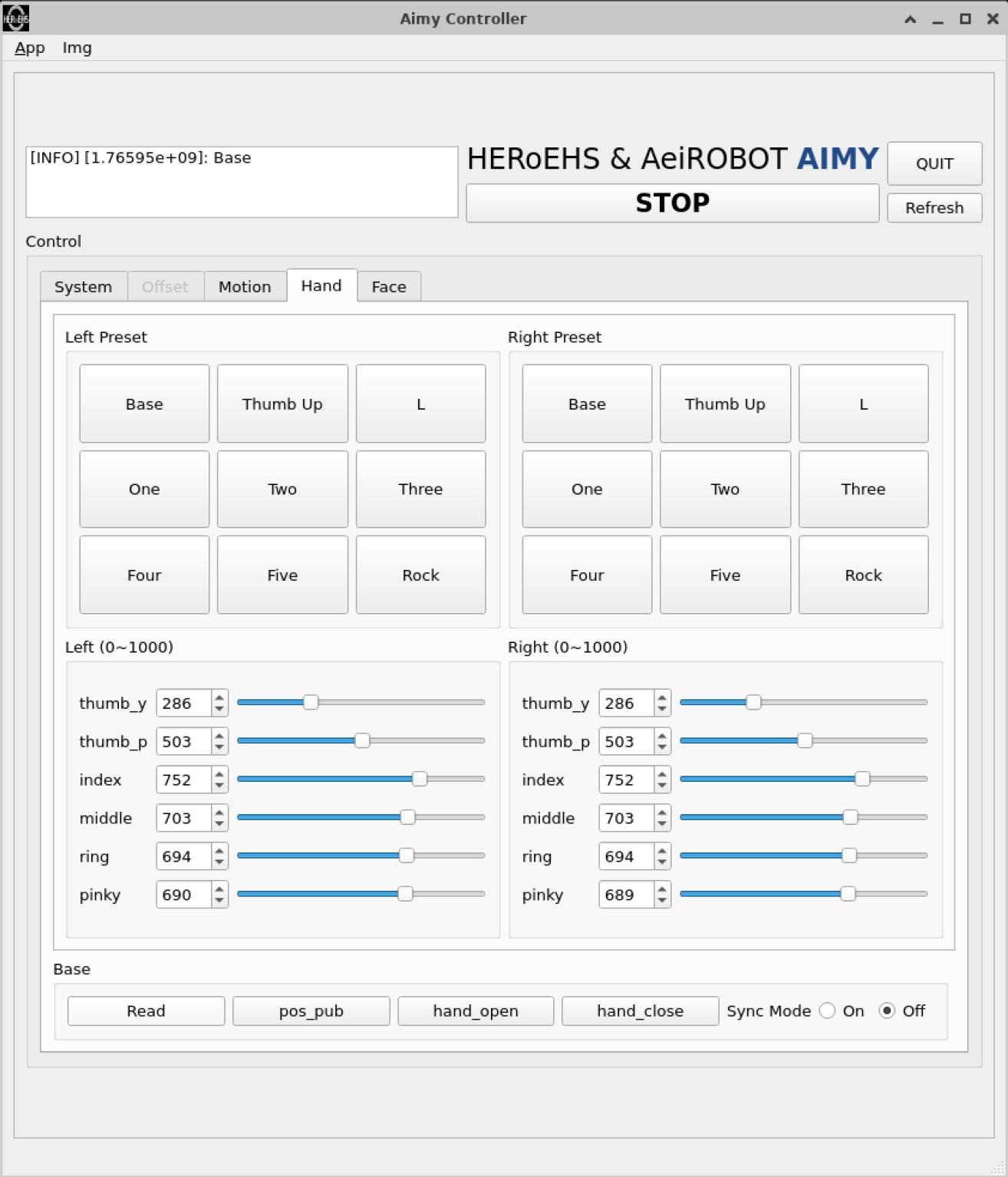
Joint Limits (공통)
| 조인트명 | 조인트 명령어 | 범위 |
|---|---|---|
| Thumb Yaw | thumb_y | 0 ~ 1000 |
| Thumb Pitch | thumb_p | 0 ~ 1000 |
| Index | index | 0 ~ 1000 |
| Middle | middle | 0 ~ 1000 |
| Ring | ring | 0 ~ 1000 |
| Pinky | pinky | 0 ~ 1000 |
기능 설명
| 버튼 | 기능 |
|---|---|
| Base |  |
| Thumb Up |  |
| L |  |
| One |  |
| Two |  |
| Three |  |
| Four |  |
| Five |  |
| Rock |  |
| Read | 현재 손가락 관절 값을 읽어 GUI에 출력합니다 |
| pos_pub | 현재 GUI에 표시된 값으로 로봇을 동작시킵니다. |
| hand_open | 손가락을 전부 핍니다. |
| hand_close | 손가락을 전부 접습니다. |
| Sync Mode | Sync mode가 켜져 있는 동안 GUI의 값이 변경될 때마다 즉시 로봇에 반영되어 로봇이 동작합니다. |
주의 사항
- Sync Mode를 켜기 전 Read를 눌러 현재 관절 값을 불러와야 합니다.
- Read를 하지 않고 Sync Mode를 키면 GUI에 표시된 관절 값으로 로봇이 빠르게 동작합니다.