데이터 수집 방법
정보
해당 과정은 베이스 자세를 기준으로 시작합니다. 베이스 자세가 아니라면 초기설치 & 세팅 가이드 탭을 참고해주세요.
HMD를 활용한 텔레오퍼레이션 또는 데이터 수집을 위해서 0. 코드 실행 과정을 수행해 주세요.
0. 코드 실행
- 데이터 수집을 수행하기 위해서는 로봇의 사용자 PC(Orin)에 접속하여 아래 코드를 실행시켜 주세요.
0.1. 데이터 수집 GUI 실행
ros2 run gr00t_data_manager data_manager
0.2. HDF5 데이터 수집 프로그램 실행
ros2 run gr00t_data_manager motion_recorder
0.3. SVO2 데이터 수집 프로그램 실행
ros2 run gr00t_data_manager camera_recorder
1. 데이터 수집 GUI
- 로봇 실행 후 SSH 또는 VNC로 사용자 PC에 접속하여 데이터 수집 GUI를 실행하면 사진과 같은 화면이 나옵니다.
- HMD 텔레오퍼레이션 앱을 실행하고 ALICE M1 연결 확인 후 아래 절차를 진행합니다.
- 데이터는 home 경로의
episode/폴더 내부에 저장됩니다.
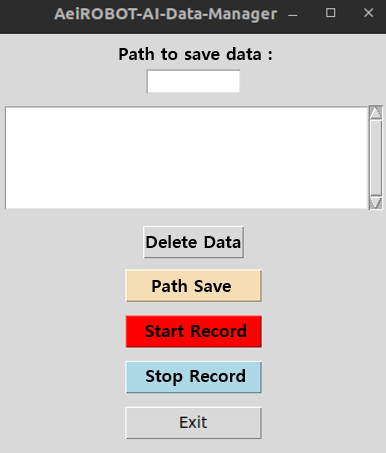
2. 버튼 기능 설명
| 버튼 | 기능 |
|---|---|
| Path to save data | 저장할 폴더/데이터 이름 지정 |
| Path Save | 위 Path 정보를 저장 |
| Start Record | 녹화 시작 |
| Stop Record | 녹화 종료 및 파일 저장 |
| Delete Data | 선택한 녹화 데이터 삭제 |
| Exit | GUI 종료 |
3. 사용 절차 예시
Path to save data에test입력Path Save클릭~/episode/test폴더가 생성됩니다.
Start Record클릭- 행동/영상 데이터 녹화를 시작합니다.
Stop Record클릭test_0.svo2,test_0.hdf5로 저장됩니다.- 이후 녹화 시 숫자가 증가합니다.
예)
test_1.svo2,test_1.hdf5
Delete Data- 스크롤바에서 삭제할 데이터를 클릭 후
Delete Data를 누르면 삭제됩니다.
- 스크롤바에서 삭제할 데이터를 클릭 후
Exit- GUI를 종료합니다.
팁
데이터 수집을 위한 툴은 사용자가 직접 만들어서 사용해도 무방합니다.
데이터 수집을 위한 이미지, 조인트 데이터에 대한 토픽 규칙과 예시는 Resources 메뉴의 ALICE M1 Command Guide 탭을 참고 부탁드립니다.
경고
- 정상적으로 svo2와 hdf5 파일을 생성하기 위해서는 Path to save data 버튼을 누르기 전 모든 코드를 실행시켜 주세요.