Hardware
개요
AIMY 3는 4자유도(4dof) 로봇 팔과 이동이 가능한 휠 베이스를 가진 로봇으로 다양한 상업 시설에서 방문객을 따듯하게 맞이하며 필요한 정보를 안내하는 로봇입니다.
주요 구성 요소
본체

| Attribute | Value |
|---|---|
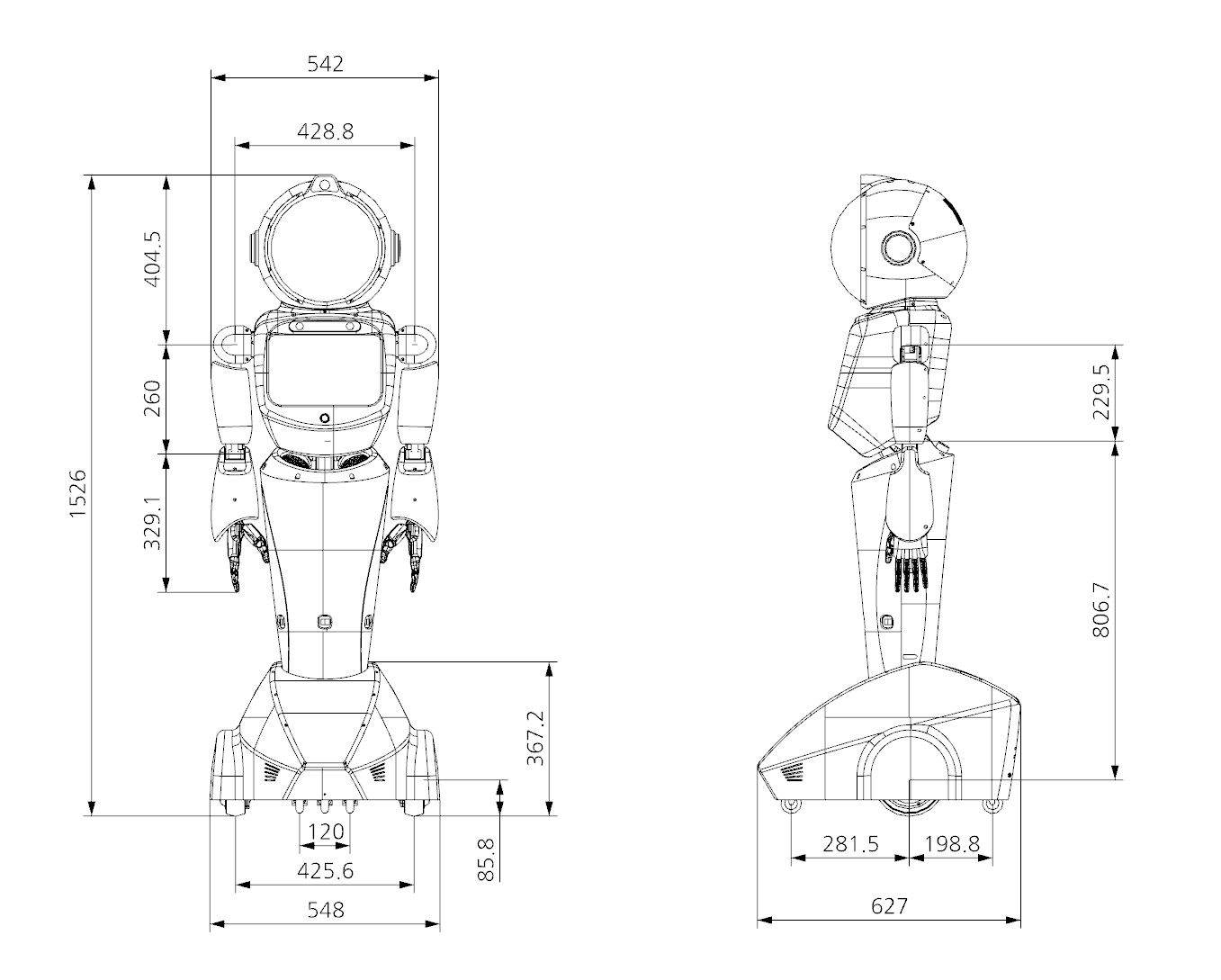
| Size | 560 x 640 x 1520mm (W x D x H) |
| Weight | 44kg |
| Battery Capacity | 22V, 100Ah |
| Power Supply Voltage | 24VDC |
| Exterior Materials | PLA |
| Degrees of Freedom | 25DoF |
| Arm Payload | 0.3kg (per Arm) |
| Arm Reach | 650mm |
| Mobile Base Speed | 0.5m/s |
| Sensor | Stereo Camera, 3D LiDAR x 3, Downward-facing laser distance sensor x 2, IMU |
| Audio | Speaker, Shure MV88+ Microphone |
| Computer | AMD Ryzen 5 7600, Nvidia RTX 4060 Ti |
자유도
| PART | DoF |
|---|---|
| Arm | 4 DoF x 2 |
| Head | 2 DoF |
| waist | 1 DoF |
| Hand | 6 DoF x 2 |
| Wheel | 1 DoF x 2 |
| Total | 25 DoF |
조이스틱 컨트롤러

- 로봇의 operation과 사용자가 직접 주행을 조작하기 위한 유닛입니다.
- 조이스틱을 통해 전진/후진, 회전, 속도 조절 등 이동 관련 명령을 직관적으로 입력할 수 있습니다.
- 조이스틱 입력은 즉시 로봇에 반영되므로, 주변 안전을 충분히 확인한 뒤 조작하세요.
충전기

- 로봇의 배터리를 충전하기 위한 전용 장치입니다.
- 실내의 평평하고 통풍이 잘 되는 곳에서 사용하며, 충전 중에는 로봇을 이동하거나 작동하지 않는 것을 권장합니다.
- 충전기나 케이블이 과열되거나 냄새/소음이 발생하면 즉시 사용을 중지하고 문의하세요.
상세 스펙 및 커스터마이징 문의
더 자세한 하드웨어 사양이나 맞춤 옵션에 대해서는 문의하기를 통해 문의해 주시기 바랍니다.
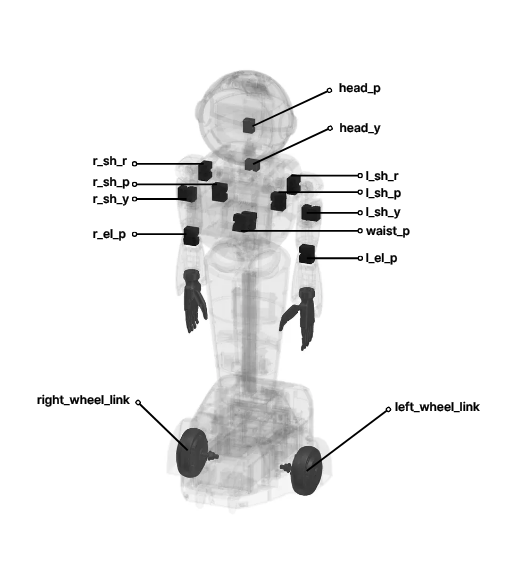
조인트 명명 및 최대 각도 범위
| 조인트명 | 조인트 명령어 | 각도 범위 |
|---|---|---|
| Head Pitch | head_p | -15° ~ 12° |
| Head Yaw | head_y | -30° ~ 30° |
| Waist Pitch | waist_p | 0° ~ 20° |
| Left Shoulder Pitch | l_sh_p | -170° ~ 154° |
| Left Shoulder Roll | l_sh_r | -62° ~ 2.7° |
| Left Shoulder Yaw | l_sh_y | -120° ~ 120° |
| Left Elbow Pitch | l_el_p | -85° ~ 4° |
| Right Shoulder Pitch | r_sh_p | -170° ~ 154° |
| Right Shoulder Roll | r_sh_r | -2.7° ~ 62° |
| Right Shoulder Yaw | r_sh_y | -120° ~ 120° |
| Right Elbow Pitch | r_el_p | -4° ~ 85° |
설계 도면